Опыт проектирования и эксплуатации устройства обнаружения лазерного излучения
21.03.2016
У серых коробочек одиноко скучает небольшого роста мужчина. Один. Фирма маленькая. Кто он? Владелец фирмы или ее директор, он же сам для себя и служба безопасности… На крупную фирму не пролезешь. Ребра поломают. Нет у меня другого выхода к приемникам отраженного лазерного луча.
Аквариум.
В.Суворов.
Для обнаружения сигналов лидара в системах предупреждения об облучении (СПО) часто применяются простейшие схемотехнические решения в виде однопорогового компаратора после входного усилителя. Дальнейшая обработка ведется с помощью встроенного процессора, который использует для анализа только значения временных промежутков между импульсами. Понятно, что такой подход к решению задачи обнаружения имеет множество недостатков. Например: на выходе компаратора сигнал уже прошел нелинейное и необратимое преобразование, и информация об амплитуде импульса потеряна безвозвратно. Кроме того, нередко применяется статический порог компаратора, установленный с «запасом» для того, чтобы внезапное повышение уровня внешних шумов (солнечные блики и т.п.) не выводило систему из рабочего режима. Разумеется, такое решение приводит к серьёзному понижению чувствительности СПО.
В итоге, гражданские системы обнаружения лидаров (в составе автомобильных радар-детекторов) способны работать только в том случае, когда луч попал прямо в приёмник. Это подается рекламистами лидар-детекторов как данность, которая связана с самим принципом лазерного измерения скорости. Рекламисты полицейских лидаров справедливо относят общепризнанный недостаток СПО к достоинствам своего метода измерения и совсем не огорчаются по этому поводу. Автомобилисты, обычно из числа тех, которые считают себя «равнее других», устанавливают активные подавители лидаров, и они в большинстве случаев работают непрерывно – с момента включения зажигания и до конца поездки.
Попробуем рассмотреть возможность обнаружения и распознавания сигнала полицейского лидара по отраженному и/или рассеянному лучу. При этом будем исходить из того, что рассеяние обеспечивается атмосферой, которая над автомобильной дорогой всегда содержит некоторое количество мелкодисперсной пыли. Будем также учитывать ненулевую вероятность отражения луча от полотна дороги (при измерении скорости идущего впереди автомобиля) или многократного отражения от поверхности этого автомобиля и местных предметов.
Вначале рассмотрим эпюры напряжений в стандартной схеме при попадании приёмного фотодиода в луч лидара.
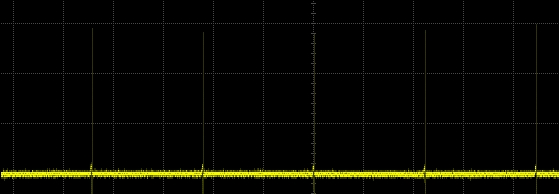
Рис.1. Осциллограмма сигнала на выходе предварительного усилителя. Видны короткие импульсы, уровень которых значительно превышает уровень шумов.
Очевидно, что на выходе усилителя будет фиксироваться аддитивная смесь внутренних и внешних шумов с полезным сигналом, который представляет собой короткий (20…50нс) импульс. Этот импульс после прохождения компаратора «регенерирует» до стандартного цифрового сигнала такой же длительности.
Для случая приёма рассеянного мелкодисперсной пылью импульса, эпюры на выходе усилителя будут совершенно другими.

Рис. 2. Снимок лазерного луча в атмосфере. В данном случае луч проходит через поле зрения фотоаппарата, но не попадает в него.
В случае работы лидара, по определению имеющего импульсный характер излучения, необходимо учитывать, что длительность лазерного импульса (20…50нс) определяет только длину светящегося участка в поле зрения детектора, т.е. 60…150 см.
Фактически, в поле зрения детектора со световой скоростью пролетает светящийся цилиндр (разумеется, только если луч не попадает в объектив). И время свечения определяется не его длиной, а длиной луча в поле зрения, и составляет в нашем случае сотни наносекунд.
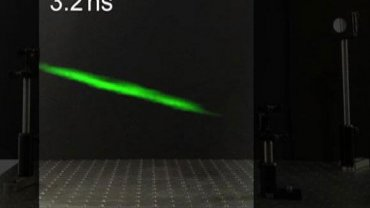
Рис.3. Съёмка короткого лазерного импульса высокоскоростной камерой (http://www.nature.com/ncomms/2015/150127/ncomms7021/full/ncomms7021.html)
В результате, именно время существования светящегося объекта в поле зрения СПО определяет длительность электрического входного импульса. Естественно, для случая, когда лазерный луч пересекает поле зрения по нормали к оптической оси приёмника. При любых других углах увеличение длительности входного импульса будет иным.
Предположим, что луч лидара направлен в сторону приёмника, и он находится в поле зрения детектора.
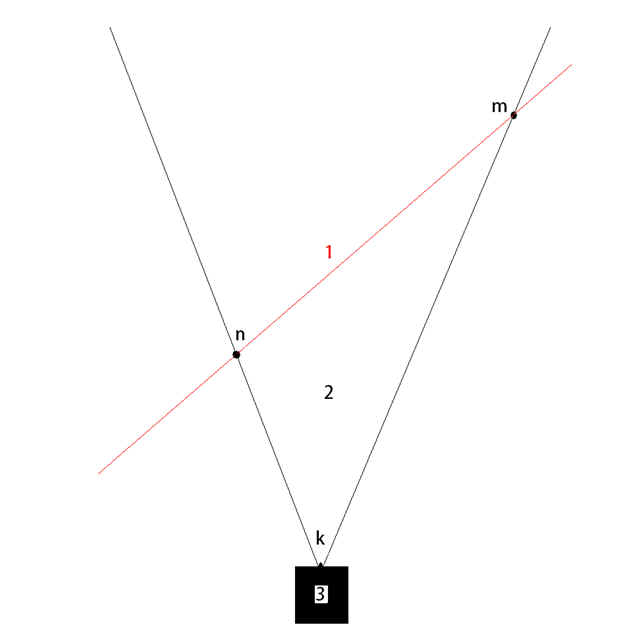
Рис.4. Луч лидара (1) пересекает поле зрения (2) лидар-детектора (3).
Тогда для встречного луча величина расширения импульса в секундах будет составлять T=(mn+nk-km)/C, где длина отрезков выражена в метрах, а скорость света – в метрах в секунду. В случае луча, идущего вдогон, T=(mn+km-nk)/C, т.е. намного больше. Для практических условий работы полицейского лидара расширение импульса составит десятки-сотни наносекунд для встречных лучей и до единиц микросекунд для лучей, идущих вдогон. При этом нужно учитывать, что у сигналов не будет коротких фронтов, т.к. форма импульса будет определяться мультипликатом входного светового потока и диаграммой направленности оптической системы.
Т.е. на выходе усилителя будет фиксироваться не импульс 20…50нс, а растянутый неравномерный фрагмент подъёма собственных шумов над нулевой линией со сглаженным спадом, а в большинстве случаев и сглаженным фронтом. Если же усилитель имеет существенное ограничение полосы пропускания «снизу» или какие-либо элементы согласованной фильтрации, рассчитанные на длительность импульса лидара (20…50нс), то растянутый во времени сигнал будет подавлен, и его обнаружение станет практически невозможным.
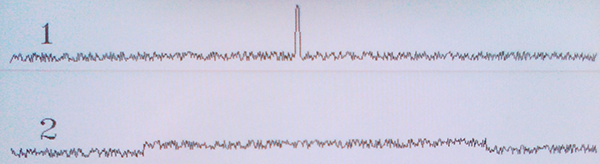
Рис.5. Короткий (1) принятый импульс (луч попадает в объектив) и «растянутый» (2) импульс (луч проходит через поле зрения, но не попадает в объектив).
Ситуацию усугубляет то, что в некоторых обнаружителях используется дифференцирование входного импульса с последующей обработкой его двухпороговым компаратором. Это схемотехническое решение действительно повышает эффективность обнаружения короткого импульса (полагая входной шум распределенным нормально и имея входной сигнал с малым превышением над «сигмой» удается получить меньшее количество пропусков цели). Однако, в случае сигнала, образованного рассеянным лучом, такой метод будет дополнительно препятствовать обнаружению: для накопления нужен интегратор, а дифференциатор «двухпороговой» схемы как раз и мешает обнаружению.
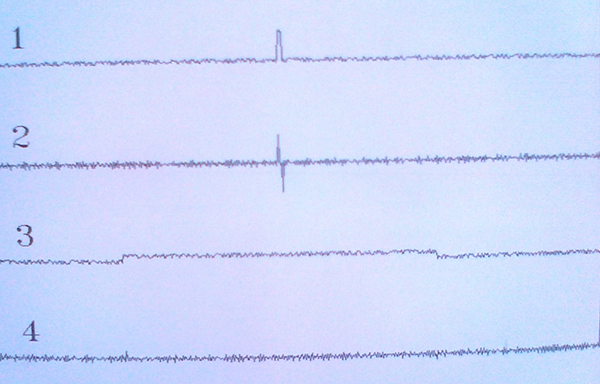
Рис.6. Короткий высокоамплитудный импульс (1) проходит через дифференциатор и пригоден для выделения двухпороговым компаратором (2). Длинный низкоамплитудный импульс (3), проходя через дифференциатор, практически не даёт отклика (4). Обнаружение после дифференциатора невозможно, хотя энергия длинного импульса в данном случае много больше.
Итак, для того, чтобы обнаруживать и короткие и длинные импульсы, проектируемые входные усилители должны удовлетворять следующим требованиям: иметь расширенную «вниз» полосу пропускания (до времён порядка 1 микросекунды), а также иметь интегрирующую цепь со временем 0.1…0.3 мкс. Кроме того, для повышения чувствительности при работе с короткими импульсами малой амплитуды, необходимо реализовать принцип двухпорогового компаратора. Т.к. классический дифференциатор в этом случае применить невозможно, приходится использовать другие схемотехнические решения.
Для проверки разработанного усилителя подадим микромощные входные оптические сигналы с длительностью импульса 50нс и 1000нс.
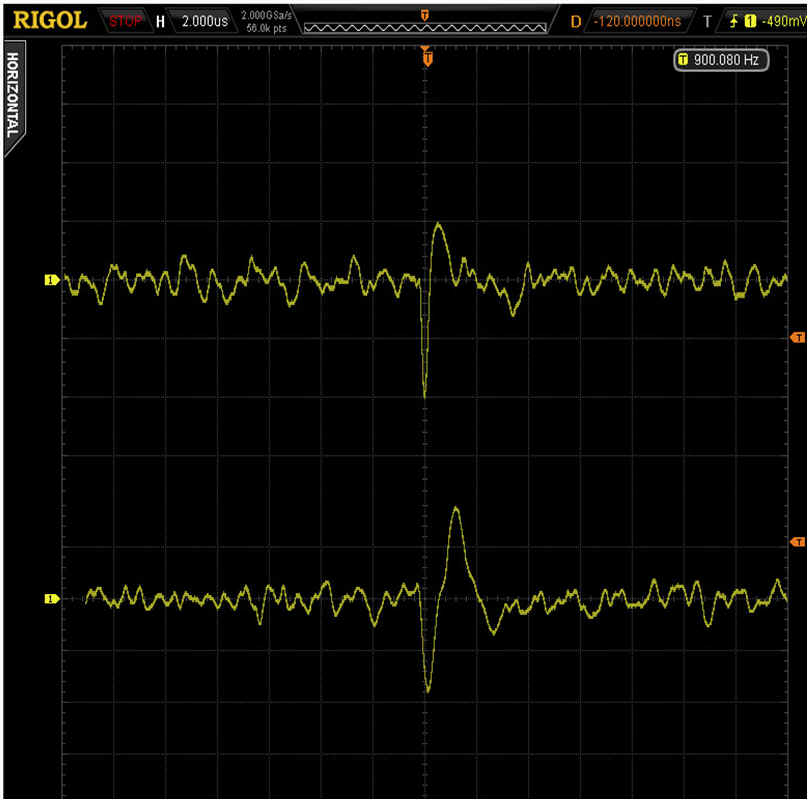
Рис.7. Осциллограмма отклика предварительного усилителя на низкоуровневый входной импульс 50нс (сверху) и на импульс 1000нс (внизу). Соотношение сигнал/шум около 3:1. Требование работы с импульсами разных длительностей выполняется (NB! сигналы инвертированы).
Дальнейшая обработка включает в себя два разнонаправленных пиковых детектора, подключенных к входам инструментального операционного усилителя. Т.о. информация об амплитуде импульса сохранится, что позволит применить адаптивный и следящий пороги, соответствующие байесовым критериям. В то же время все достоинства решения с двухпороговым компаратором также сохраняются, ведь на выходе ОУ сигнал имеет уже не нормальное, а рэлеевское распределение (т.к. сигнал стал однополярным).
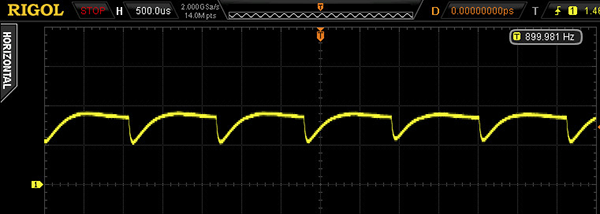
Рис.8. Инвертированный сигнал на выходе операционного усилителя. Импульсы следуют с частотой 900 Гц .
Последующий анализ сигнала целесообразно выполнять в цифровом варианте. Здесь также возникают несколько противоречивых требований. В идеале – порог, после преодоления которого, принимается решение об обнаружении импульса, должен обеспечивать равную цену ошибок первого и второго рода. Но при реальной эксплуатации прибора уровень входных шумов постоянно и неустранимо «плавает», что требует использования динамического порога. В то же время, скорость адаптации порога не может быть константной, т.к. внезапная засветка прибора солнцем требует быстрой адаптации, а отслеживание серии низкоуровневых импульсов – медленной.
Наилучшим решением для динамического порога оказался подсчёт числа пересечений за фиксированное время. При этом легко установить слежение по заданному коэффициенту сигмальных отклонений, а подтверждение пересечения наступает только после превышения величины 4,5 «сигма» (вот здесь, кстати, и реализуется преимущество сохранённой информации об амплитуде импульса). Однако в случае быстрого повышения уровня помех такая система не всегда успевает адаптироваться.
Для исключения подобных коллизий имеет смысл использовать следящий порог, который никогда не может быть ниже динамического. Он вычисляется как половина от полусуммы предыдущего значения порога и пикового значения предыдущего импульса.
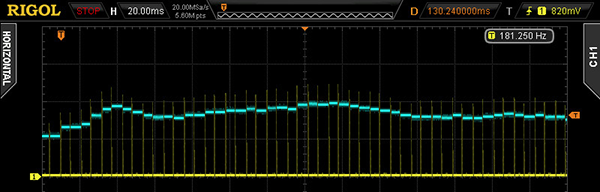
Рис.9. Изменяющийся по амплитуде сигнал. Синим цветом обозначен уровень следящего порога (используется коэффициент 0.8 вместо 0.5 для наглядности)
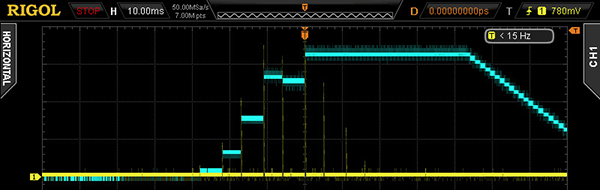
Рис.10. Случай пропуска импульсов при использовании небайесового значения порога. Однако через некоторое предельное время порог начинает снижаться. Это время выбрано из расчёта максимального временного расстояния между импульсами самого низкочастотного из полицейских лидаров.
Т.о. при использовании следящего и динамического порогов удается получить преобразование входного сигнала в последовательность чисел, описывающих временное расстояние между зафиксированными импульсами. Принцип дальнейшей обработки очевиден: необходимо постоянно сравнивать получаемый числовой массив с сигнатурой известных лидаров. Кроме того, имеет смысл параллельно использовать эвристический алгоритм, опирающийся на априорно известные автокорреляционные характеристики лидарных сигналов.
Оптическая система не имеет каких либо особенностей. Используется схема Кеплера или единичная линза (с учетом кривизны сферической поверхности приёмного фотодиода). Угол обзора составил 20˚, но если оценивать поле зрения как диаграмму направленности, то уровень половинной мощности был равен 12˚. Чувствительность даже при работе через лобовое стекло автомобиля была более чем удовлетворительной.
Первый экспериментальный прибор совместно со стандартными детекторами «Conqueror» и «Crunch» (были закреплены сверху и снизу лобового стекла) проходил испытания в течение полутора лет. Прибор располагался рядом с подголовником водителя, т.е. лобовое стекло обеспечивало такое же затухание сигналов.
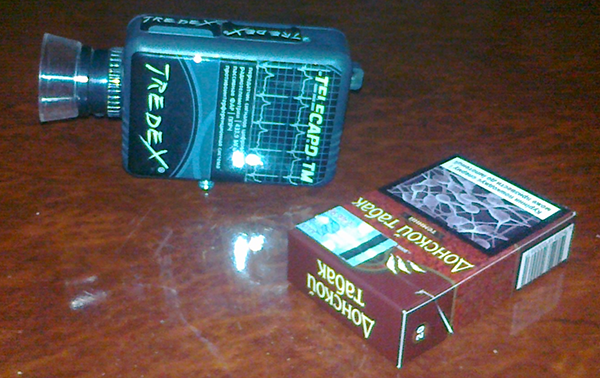
Рис.11. Внешний вид первого экспериментального прибора

Рис.12. Вторая модель детектора, место установки. С его помощью удалось получить множество интересных и неожиданных результатов.
Методика испытаний была максимально приближена к реальным условиям эксплуатации: на въезде в город находится пост ДПС, который с помощью лидара «TruCam» не ленится измерять скорости всех «быстроходных целей». Т.к. автору приходится проезжать этот пост два раза течение рабочего дня, не составляло труда дождаться очередного кандидата на штраф и двигаться за ним на удалении 100-200 метров. Моменты обнаружения лидарных импульсов фиксировались как от экспериментального прибора, так и от стандартных детекторов «Conqueror» и «Crunch», а оцифрованный сигнал с выхода ОУ записывался для последующего анализа и уточнения сигнатуры. Разумеется, эти сигналы записывались и в случае работы измерителя скорости непосредственно по автомобилю автора.
Стандартные детекторы (оба!) за всё время наблюдений ни разу не сработали при измерении скорости автомобиля, идущего впереди. В случае работе лидара непосредственно по моему автомобилю обнаружения бывали примерно в трёх случаях из десяти. При этом ни разу не удалось обнаружить работу лидара с расстояния более 300 метров. Ложных срабатываний за всё время испытаний не зафиксировано. В принципе, это ожидаемые результаты, практически идентичные тем, которые публикуют другие пользователи (возможно, «элитные» модели работают лучше, но таких данных найти не удалось).
Экспериментальный прибор показал совершенно другие результаты. Факт работы лидара по идущему впереди автомобилю считался достоверным, если сотрудники ДПС останавливали его, либо удавалось увидеть прицеливание. Во всех таких случаях излучение обнаруживалось, пропусков не замечено. Кроме того, при подъезде к месту измерений неоднократно фиксировалась излучение лидара, максимальное расстояние составляло около 600 метров. Работа лидара по автомобилю автора обнаруживалась всегда. Ложных тревог от естественных причин (изменение освещённости, направление объектива на Солнце, работа светодиодных светофоров, ксеноновый свет встречных автомобилей и т.п.) не было.
Здесь читатель вправе призвать автора к ответу и потребовать объяснений: как же так – СПО уважаемых фирм молчат, а игрушка, сделанная никому не известной конторой из страны третьего мира, уверенно обнаруживает и распознаёт сигналы? Не напоминает ли это рекламные тексты фармакологических компаний, обещающих немедленное выздоровление, вечную молодость и возвращение шевелюры в том случае, если легковерный пациент пришлет им немножко денег на заведомое плацебо?
Ответ известен ещё с 70-х годов прошлого века. Итак: «…Такое повышение чувствительности устройства позволяет обнаруживать не только прямое лазерное излучение, то есть в пределах пятна лазерного луча на объекте, но и рассеянное в атмосфере лазерное излучение, так как интенсивность рассеянного вперёд лазерного излучения в пределах угла 1°…2° примерно на 2 порядка меньше, чем в прямом луче» [1],[2]. Оказывается, лидар-детектор просто обязан сработать во всех случаях, когда лазерный луч направлен на автомобиль, в котором он находится, а не только тогда, когда луч попал прямо в объектив. А если это не так, то детектор (несмотря на солидный «лэйбл» на крышке) просто туповат, дубоват, и ни к чорту не годится. Более того, он был обязан «видеть» луч лидара и в случае более значительных отклонений, чем 1°…2° т.к. аэрозольное рассеяние над автомобильной трассой намного превышает молекулярное: «…к аэрозолям в атмосфере относят переносимые ветром частицы пыли и соли, продукты сгорания (сажа, пепел), конденсированные органические остатки и вещества, образующиеся в ходе химических реакций… ». [3]
Подтвердить вышеизложенное можно следующими иллюстрациями:


Рис.13. Иллюстрация особенностей формирования и распространения лазерного излучения красного полупроводникового лазера в атмосфере. (Автор фото – Елена Павлович).
1. Лазерный излучатель.
2. Трасса распространения лазерного излучения (лазерный луч).
Итак, «гидрометеоры, мелкодисперсная пыль и иные мельчайшие частицы, перманентно присутствующие в атмосфере, переотражают попадающее на них лазерное излучение в широком пространственном угле, благодаря чему лазерный луч виден не только при наблюдении под нулевым углом к оси излучения лазера, но и под большими углами к ней». Попросту говоря, трасса распространения лазерного излучения «светится» в соответствующем частотном диапазоне.
Из иллюстраций видно, что лидар является источником мощного потока излучения не только в направлении оси распространения, но и в иных направлениях, под достаточно большими углами к оптической оси. Это значит, что если полицейский лидар находится в поле зрения детектора, наличие модулированного лазерного излучения обязано фиксироваться штатно работающей системой предупреждения об облучении, даже если лазерный луч и не попал в объектив приемника,

Рис.14. Отражение лазерного излучения элементами корпуса автомобиля (Автор фото – Елена Павлович).
1. Точка попадания лазерного луча в передний бампер автомобиля.
2. Диффузное отражение лазерного излучения деталями передней проекции автомобиля.
3. Отраженное излучение, зафиксированное фотоаппаратом.
4. Освещенная красным (в данном случае) светом часть обочины дороги перед бампером автомобиля – результат отражения лазерного излучения диффузной отражающей поверхностью.
Т.о., представление о том, что при работе лазерного излучателя весь поток энергии распространяется исключительно внутри сформированного лидаром лазерного луча, является достаточно грубым приближением к действительности. На самом деле, светится не только вся трасса прохождения луча и сам излучатель, но благодаря многократному переотражению - и атмосфера над полотном дороги, и автомобиль, на который попал лазерный луч, и все иные объекты на трассе и рядом с ней, на которые попадает рассеянное лазерное излучение. Работа лазерного излучателя в условиях атмосферы обязательно вызывает свечение вдоль всей трассы распространения луча, включая и сам лидар. Разумеется, мощность этого переотраженного излучения намного ниже мощности прямого излучения, что и предъявляет высокие требования к чувствительности системы предупреждения об облучении.
Практическая проверка чувствительности разных СПО к рассеянному лазерному излучению выявила неожиданные эффекты, объясняющие ограниченную работоспособность выпускаемых многими фирмами лидар-детекторов.
https://www.youtube.com/watch?v=Ek-J2eMkCvY
Некоторые результаты пока не очень понятны и авторам работы, но «что видим, о том и поём».
Полной неожиданностью при проведении испытаний оказались сигналы, идущие от некоторых встречных автомобилей, преимущественно престижных марок. Оказалось, что лазерные джаммеры очень популярны на Украине, а мощность их поражала. В ряде случаев удавалось фиксировать работу таких устройств с расстояния 500 метров и более. И ведь детектор был установлен в кабине, за лобовым стеклом, а диаграмма направленности джаммеров была широкой, в отличие от лидаров. Какова же мощность этих устройств? Выяснилось, что джаммеры генерируют периодический сигнал, который, однако, отличается от сигнала «TruCam», что позволило разделять цели.
На этом, наверно, можно поставить точку. И если Беккенбауэр говорил что «…футбол есть самая существенная из несущественных вещей», то вопрос своевременного обнаружения полицейских лидаров уж точно относится к области несущественного. Тем более что у нас полностью прекратили контроль скорости на дорогах (Sic!), и ничего, живём помаленьку. А уж обнаружение джаммеров… ну, это точно забота не наша. Но надеемся, что некоторые из использованных в приборе методов приёма рассеянного излучения имеют право на жизнь.
P.S. Разработкой прибора также занимались: Игорь Гафтонюк (ЦОС, программирование ЦП), Владислав Мишкин и Вадим Симаненко (аналоговая часть и оптика), Роман Кириченко (компоновка и корпус).
P.S.
Основной бизнес ООО "Компания TREDEX" – разработка и производство компьютерной медицинской аппаратуры. Мы не планируем разработку полнофункционального радар-детектора, так как работа в области СВЧ аппаратуры не входит в наши планы. Однако, мы имеем основания считать, что разработанный нами детектор лазерного излучения на данный момент превосходит все образцы на рынке радар-детекторов, которые нам удалось испытать.
ООО "Компания TREDEX" заинтересована в контактах с производителями радар-детекторов с целью коммерциализации разработки.
[1] Зуев В.Е. «Распространение видимых и инфракрасных волн в атмосфере», Изд. «Советское радио», М., 1970.
[2] «Устройство обнаружения лазерных излучений» http://poleznayamodel.ru/model/13/133325.html
[3] [PDF] Описание процесса распространения оптического ... - Nag.ru
Категории:
- Войдите, чтобы оставлять комментарии
|
|
|
Комментарии
alexeyk
28.06.2016 - 20:10
Постоянная ссылка (Permalink)
Вообще не факт, что джаммеры. У volvo есть city safety - система автоматического экстренного торможения. Что-то похожее видел у мерседеса.